MAKE A MEME
View Large Image
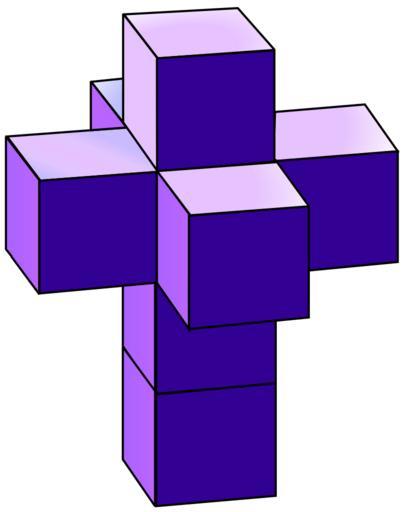
| View Original: | Tesseract2.svg (188x239) | |||
| Download: | Original | Medium | Small | Thumb |
| Courtesy of: | commons.wikimedia.org | More Like This | ||
| Keywords: Tesseract2.svg Image of a three-dimensional net of a en tesseract created by en User Dmn with en Paint Shop Pro The net of a tesseract is the unfolding of a tesseract into 3-D space Let the dimension from left to right be labeled x the dimension from bottom to top be labeled z and the dimension from front to back be labeled y Let coordinates by x y z Let the top cube have coordinates 0 0 1 the cube below it have coordinates 0 0 0 the cube in front of it have coordinates 0 1 0 the cube behind it have coordinates 0 1 0 the cube to the left 1 0 0 the one to the right 1 0 0 Let the cube below the central one have coordinates 0 0 1 and the one at the bottom 0 0 2 The central cube 0 0 0 is seen to be connected to six other cubes but when folded in 4-D every cube connects to six other cubes The frontal cube 0 1 0 connects in the Y direction to 0 0 2 in the +Y direction to 0 0 0 in the +X direction to 1 0 0 in the X direction to 1 0 0 in the +Z direction to 0 0 1 in the Z direction to 0 0 1 There are twelve different ways in which the tesseract can be rotated in 4-D by 90 degrees in such a way that four of the cubes exchange positions cyclically while the remaining four cubes stay in place but rotate in 3-D For example one 4-D rotation causes the following four-cube exchange 0 0 1 넂 0 0 0 넂 0 0 1 넂 0 0 2 넂 0 0 1 Meanwhile the same rotation causes cube 0 1 0 to rotate 90 degrees around the +X axis the 0 1 0 cube to rotate 90 degrees around the X axis the 1 0 0 cube to rotate 90 degrees in the Y direction and the 1 0 0 cube to rotate 90 degrees in the +Y direction The twelve 4-D rotations are <br> 1 0 0 1 넂 0 0 0 넂 0 0 1 넂 0 0 2 넂 0 0 1 <br> 9 0 0 1 넂 1 0 0 넂 0 0 1 넂 1 0 0 넂 0 0 1 <br> 10 0 0 1 넀 1 0 0 넀 0 0 1 넀 1 0 0 넀 0 0 1 <br> 11 0 0 1 넂 0 1 0 넂 0 0 1 넂 0 1 0 넂 0 0 1 <br> 12 0 0 1 넀 0 1 0 넀 0 0 1 넀 0 1 0 넀 0 0 1 Each 4-D rotation has a dual which is perpendicular to the 3-D rotation of the stationary cubes There are six pairs of dual 4-D rotations <br> 1 넄 4 <br> 2 넄 3 <br> 5 넄 12 <br> 6 넄 11 <br> 7 넄 9 <br> 8 넄 10 <br> The dual of a 4-D rotation implies by means of the right-hand rule how the stationary cubes are supposed to rotate in 3-D Since there are eight cubes and each cube connects to six other cubes then each cube has a pair of cubes to which it does not connect 1 itself and 2 its opposite Thus there are four pairs of opposite cubes <br> 1 0 0 1 넄 0 0 1 <br> 2 0 0 0 넄 0 0 2 <br> 3 1 0 0 넄 1 0 0 <br> 4 0 1 0 넄 0 1 0 Each pair of opposite cubes aligns itself along opposite sides of one of four orthogonal axis of 4-D space Therefore it is possible to establish a one-to-one onto mapping f between the unfolded positions of the cubes in 3-D and the canonical coordinates of their folded positions in 4-D viz <math> f -1 0 0 \mapsto -1 0 0 0 -I </math> <math> f 1 0 0 \mapsto 1 0 0 0 I </math> <math> f 0 -1 0 \mapsto 0 -1 0 0 -J </math> <math> f 0 1 0 \mapsto 0 1 0 0 J </math> <math> f 0 0 1 \mapsto 0 0 1 0 K </math> <math> f 0 0 -1 \mapsto 0 0 -1 0 -K </math> <math> f 0 0 0 \mapsto 0 0 0 1 1 </math> <math> f 0 0 -2 \mapsto 0 0 0 -1 -1 </math> The canonical 4-D coordinates have been given labels corresponding to basis en quaternions and their negatives Using these labels the 4-D rotations can be expressed more simply as <br> 1 K 넂 1 넂 K 넂 1 넂 K <br> 2 K 넂 1 넂 K 넂 L 넂 K <br> 3 I 넂 J 넂 I 넂 J 넂 I <br> 4 I 넂 J 넂 I 넂 J 넂 I <br> 5 I 넂 1 넂 I 넂 1 넂 I <br> 6 I 넂 1 넂 I 넂 1 넂 I <br> 7 J 넂 1 넂 J 넂 1 넂 J <br> 8 J 넂 1 넂 J 넂 1 넂 J <br> 9 K 넂 I 넂 K 넂 I 넂 K <br> 10 K 넂 I 넂 K 넂 I 넂 K <br> 11 K 넂 J 넂 K 넂 J 넂 K <br> 12 K 넂 J 넂 K 넂 J 넂 K <br> All of these rotations follow a pattern A 넂B 넂 A 넂 B 넂A so that each one can be abbreviated as an ordered pair A B Then each rotation can be abbreviated furthest as the product of the ordered pair of quaternions which yields an imaginary quaternion <br> 1 K 1 K <br> 2 K 1 K <br> 3 I J K <br> 4 I J K <br> 5 I 1 I <br> 6 I 1 I <br> 7 J 1 J <br> 8 J 1 J <br> 9 K I J <br> 10 K I J <br> 11 K J I <br> 12 K J I <br> The pairs of dual quaternions are then seen to have the following properties the products of their single-quaternion abbreviations are always unity <br> 1 넄 4 K K 1 <br> 2 넄 3 K K 1 <br> 5 넄 12 I I 1 <br> 6 넄 11 I I 1 <br> 7 넄 9 J J 1 <br> 8 넄 10 J J 1 <br> Each of the twelve rotations has a pair of candidate duals but one of them is the reversal of the rotation i e given rotation A B its reverse is A B so it is disqualified as the dual of A B leaving only one possible dual See above text taken from cited source File Tesseract2 png 2007-04-01 Traced by User Stannered PD original File Tesseract2 png File Tesseract net Crooked House svg en English Wikipedia Dmn Created with Inkscape Tesseract nets | ||||
{kind=link}
{kind=link}