MAKE A MEME
View Large Image
| View Original: | 330-PSA-34-60-1.jpg (2944x2304) | |||
| Download: | Original | Medium | Small | Thumb |
| Courtesy of: | www.flickr.com | More Like This | ||
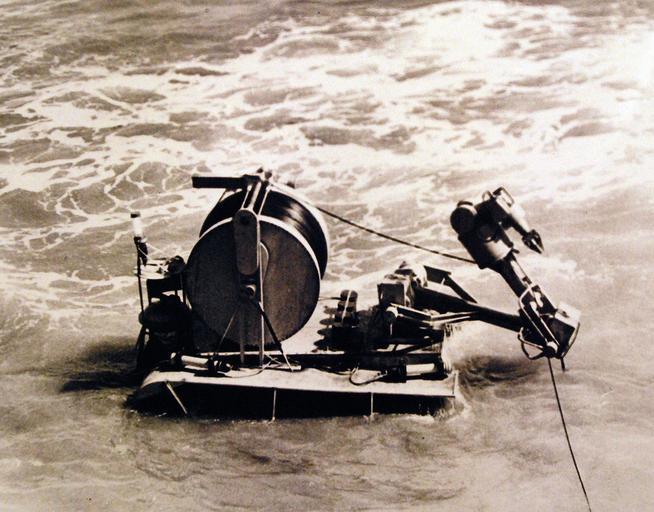
| Keywords: outdoor 330-PSA-34-60-1: Navy Reveals New Remote Control Undersea Vehicle for Exploring Ocean Bottom. A unique remote control undersea vehicle for exploring and conducting scientific studies of the ocean bottom for prolonged periods at great depths has been developed for the Office of Naval Research. The new vehicle was demonstrated for news media off the shore of La Jolla, California, May 16, 1960. Dubbed “RUM” for remote underwater manipulator, the vehicle is essentially a tank equipped with a long, jointed manipulator arm and hand together with specially devised underwater television cameras which serve as the eyes of the vehicle’s operator on shore. The development of the remote underwater manipulator was directed by Dr. Victor Anderson of the Marine Physical Laboratory of the Scripps Institution of Oceanography of the University of California at La Jolla for use in cooperation with the Hudson Laboratories of Columbia University. The goal of the Navy RUM development is to have available a vehicle capable of performing controlled-work functions in the oceanographic research. This includes observation of the sea floor, the collection of samples and specimens, and the assembly and installation of deep bottom-mounted instrumentation in the ocean. RUM can operate at depths down to 20,000 feet, maintaining a speed of 3 miles per hour where level bottom soil conditions permit. It can maneuver and operate on grades of 60 percent and is capable of climbing a vertical obstacle 12 inches in height. Photograph released May 17, 1960. (8/25/2015). 330-PSA-34-60-1: Navy Reveals New Remote Control Undersea Vehicle for Exploring Ocean Bottom. A unique remote control undersea vehicle for exploring and conducting scientific studies of the ocean bottom for prolonged periods at great depths has been developed for the Office of Naval Research. The new vehicle was demonstrated for news media off the shore of La Jolla, California, May 16, 1960. Dubbed “RUM” for remote underwater manipulator, the vehicle is essentially a tank equipped with a long, jointed manipulator arm and hand together with specially devised underwater television cameras which serve as the eyes of the vehicle’s operator on shore. The development of the remote underwater manipulator was directed by Dr. Victor Anderson of the Marine Physical Laboratory of the Scripps Institution of Oceanography of the University of California at La Jolla for use in cooperation with the Hudson Laboratories of Columbia University. The goal of the Navy RUM development is to have available a vehicle capable of performing controlled-work functions in the oceanographic research. This includes observation of the sea floor, the collection of samples and specimens, and the assembly and installation of deep bottom-mounted instrumentation in the ocean. RUM can operate at depths down to 20,000 feet, maintaining a speed of 3 miles per hour where level bottom soil conditions permit. It can maneuver and operate on grades of 60 percent and is capable of climbing a vertical obstacle 12 inches in height. Photograph released May 17, 1960. (8/25/2015). | ||||
{kind=link}